



Selfie project
WUT students and their autonomous cars
Vehicles designed and programmed to be driverless or to require little intervention from the driver are the future of mobility. Students of the Robotics Student Research Group at the Faculty of Power and Aeronautical Engineering follow the trends and their passion for growth. They create autonomous cars that compete in international competitions. And they win!
The students’ Selfie project has produced several versions of the vehicle. This is because of the requirements issued by the promoters of individual competitions. Cars must be able to perform a range of different tasks. The key ones are parking, traveling under simulated road traffic settings, avoiding obstacles, responding to the start signal from the traffic lights or stopping outside the track.
The structures in the Selfie family are not full-sized cars for a driver to hop inside, but several times scaled-down models. “Scale cars have low prototype manufacturing cost but enable testing of location and navigation algorithms for real-world cars,” says Michał Jarzyński.
Blending best ideas
The priority for WUT students is and has always been to develop their skills through creating vehicles (especially in designing electronics, control systems and mechanics and in writing computer vision algorithms), and to put their ideas to a test.
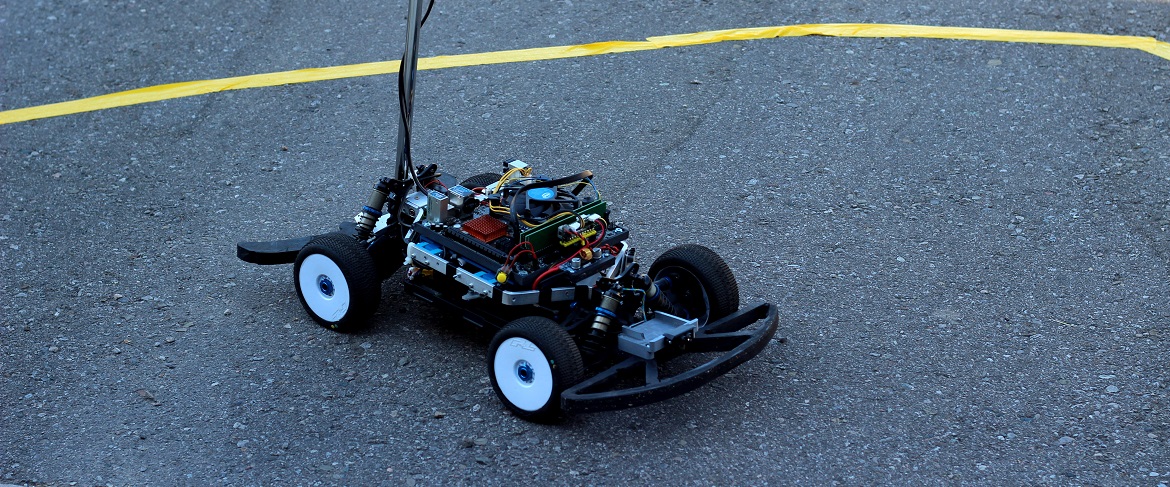
Selfie cars are capable of driving autonomously under simulated road traffic settings. They are equipped with a camera, a computing unit, a controller and a set of sensors such as a magnetic coding device, distance sensors and inertial motion sensors.
“We have made sure to select the parts for our car carefully in order to create a winning vehicle for the competitions,” says Kornelia Łukojć. “Our embedded system ensures reliable and ultrafast control.” The machine vision uses the OpenCV library, which allows writing custom scripts to search for particular elements in the camera frame, and with the prediction system in place we can optimize the route according to different algorithms.

A strong team spirit are and have always been essential, photo by the Robotics Student Research Group
Experiences, wins and plans
The first Selfie debuted in 2018 Carolo Cup in Germany. The team of the Robotics Student Research Group worked on the car from the summer of 2017 to February 2018. This was a 1:10 scale model. “That competition runs in two categories,” explains Mateusz Mróz. “We have entered the simpler one this year; it is about driving along a track, overtaking your contenders, giving way on the track and parking in the designated spaces. Eventually, we came in seventh place. Moving forward, we want to enter the other, more advanced category; here the additional challenges are heeding traffic signs or pedestrians.”
The students are planning to create the fourth version of their Selfie for the next year’s event.
The second autonomous car model was built from March to July 2018. And this one has been a huge success for the team, earning them a win in 2018 International Autonomous Robot Racing Challenge in Canada. This is a 1:8 scale car. During the competition, it had to complete two main event parts: driving in a straight line and on a track. “The additional difficulty was that the track was arranged on an outdoor parking lot, which meant changing conditions for the cameras installed in the car,” says Kornelia Łukojć.
Currently, the students are working on the third Selfie car intended for the F1/10 competition in Italy in late September to early October. “The purpose behind this racing event is to develop effective, reliable and, most importantly, universal control algorithms for autonomous cars,” explains Michał Jarzyński. “To provide equal chances for all contenders, the promoters have restricted the choice of equipment for the car construction. We know nothing about the settings that our car is expected to face, so our first priority is to make it as versatile as possible.”
The winning team
Around 10 people are continuously involved in the Selfie project. The size and the composition of the team varies slightly over time. The key reason is that senior members are graduating and leaving the Student Research Group and new members are joining in.
The students are divided into four sub-teams: Embedded System (dealing with the car control, microprocessors and user communication – safety systems); Machine Vision (dealing with computer vision and the operation of the LIDAR sensor); Prediction System (dealing with the car route optimisation and serving as a liaison between the former two groups); and Mechanics (handling the car mechanics design).
The people behind the Selfie cars have had no prior experience in autonomous car projects. Thus hard and steady work and a strong team spirit are and have always been essential. “Each of us has learnt a lot working on this project,” says Kornelia Łukojć. “We see each other at our weekly meetings where we discuss design issues and if anyone stumbles upon a problem, he or she can bring it up at a meeting and there is always someone with a solution.”
The team members are: Mateusz Perciński, Mateusz Mróz, Michał Jarzyński, Mateusz Grudzień, Kornelia Łukojć, Maciej Krasa, Mateusz Marczuk, Krzysztof Gawin, Łukasz Jakubowski, Mikołaj Marcinkiewicz.
The travel to the competition was arranged under the project “Construction and Development of 1:10 Scale Autonomous Cars for Carolo-Cup and International Autonomous Robot Racing Challenge” – “The Best of the Best 2.0” funded by the European Union under the Operational Program Knowledge Education Development (POWER) of the Ministry of Science and Higher Education.
Agnieszka Kapela
Promotion and Information Office
© 1998-2026 Warsaw University of Technology
Pl. Politechniki 1, 00-661 Warsaw, Poland
