


SODAR 3D – scanning of the space
The Radiolocation and Digital Signal Processing Students' Research Group at the Faculty of Electronics and Information Technology have designed a prototype device made to scan space using ultrasound imaging with a steered beam on a moving platform. It is a step towards creation of an autonomic robot which will be scanning space and creating maps of the surroundings on which it will move.
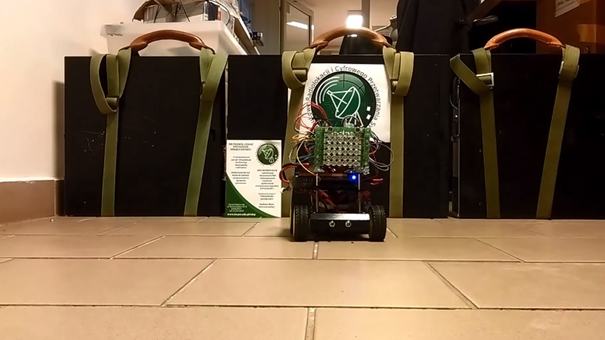
The platform is a vehicle which has a remote control designed by members of the Research Group. It is equipped with some of the most high-tech hardware for building systems in real time - myRIO made by National Instruments company. The construction made by WUT’s students can communicate with a computer via wifi. Such a solution enables using the machine in any place which has wireless network ie. at home, at university or anywhere in public spaces. The software, which students from the Digital Signal Processing Research Group designed, receives commands from a user, and due to the real-time processor working in myRIO system interprets commands of movement and sends appropriate steering signals to all four engines producing direct current for power-driven wheels.
Another invention of the Radiolocation and Digital Signal Processing Students' Research Group is an ultrasound radar SODAR 3D (Sound Detection and Ranging) with an electronically-steered laser beam. The device is made to create virtual (2D and 3D) maps without having to steer the beam. The concept of the radar is based on making the phased-array on two levels. – Classic sonar emits pulses of sounds and listens for echoes in order to estimate the location of an object. Because we have used a two-dimension array (matrix) of transmitters size 6×6, the robot can generate points in various places and create a 3D map so that it can move even without any visibility, says Marcin Żywek, Head of Radiolocation and Digital Signal Processing Students' Research Group.
The radar is made of three elements: a transmitter, a receiver and a power conversion unit. These three modules can be put on top of each other thanks to the mounting holes. This way they create a matrix of converters for a 3D scanner. In the future, the mobile platform with special equipment could be used for surface imaging using Synthetic-Aperture Radar (SAR). This is what the Students' Research Group is focusing on.
This research project touches areas such as: robotics, automatics and the automotive industry.We are planning to use the device to create a larger system of robots including flying ones that would scan space in great complexity. We would like to create an interdisciplinary team where members of various Students’ Research Groups could join forces, says Marcin Żywek.
Team members of SODAR 3D project:
- inż. Marcin Żywek (Head of the Radiolocation and Digital Signal Processing Students' Research Group)
- inż. Tomasz Zieliński
- inż. Mikołaj Sowiński
- inż. Patryk Oleniuk
- Wojciech Błaszczuk
- mgr inż. Jędrzej Dudkiewicz
- mgr inż. Paweł Roszkowski
- mgr inż. Marcin Bączyk
